



描述
导读
随着智能材料,智能制造技术的发展,人机交互需求的增加,“软体机器人”得到了一大批科学家的青睐。近日,南丹麦大学(Southern Denmark University,SDU)的软体机器人实验室在油管(YouTube)发布了一则视频,展示了该实验室研究者的一些代表作品。其中包含了非常经典“剪纸”软体机器人的相关研究,今天小编就为大家罗列出该实验室的一些“明星”软体机器人!Ahmad Rafsanjani教授是该实验室的主要负责人之一,他先前于苏黎世联邦理工学院(ETH Zürich)获得博士学位,之后又在ETHZ和哈佛大学从事博士后的研究。
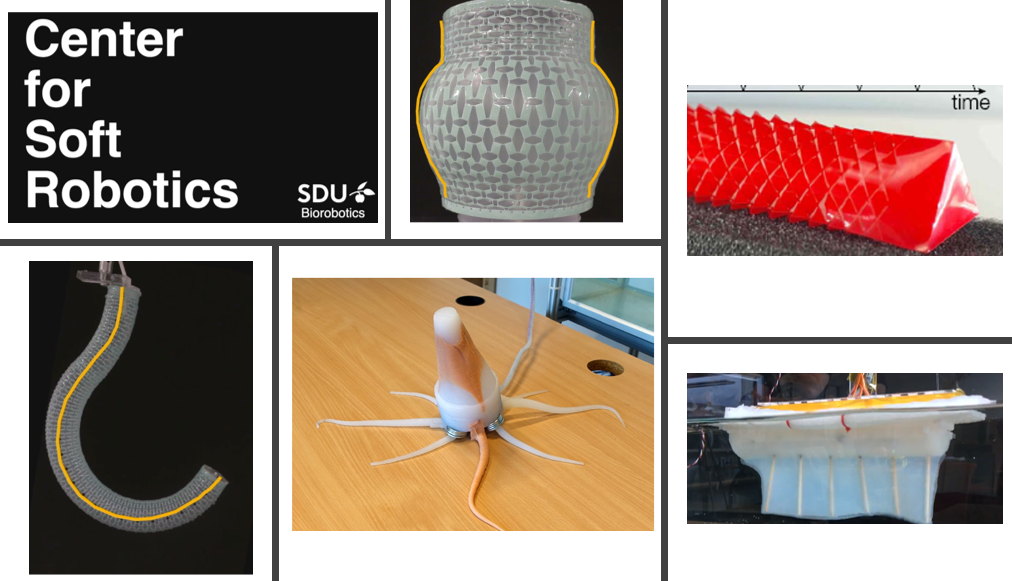
图1. 南丹麦大学的软体机器人介绍一览
▍南丹麦大学软体机器人研究中心
南丹麦大学(University of Southern Denmark, SDU,1966年)在通讯,信息技术,工程学和生命科学领域在世界上享有极高的声誉。SDU的软体机器人研究中心(Center for Soft Robotics)的科学家们有代表性的软体机器人研究在宣传视频中展出(文末附有完整的宣传视频)。该中心目前的研究方向主要在探索新型结构和材料在软体机器人中的应用。
南丹麦大学软体机器人实验室网址:
https://www.sdu.dk/en/forskning/sdu_biorobotics/research+areas/soft+robotics
▍受到蛇运动启发的剪纸软体机器人
蛇依靠腹足有规律的波动前进,研究人员受到启发,结合“剪纸艺术(Kirigami)”的原理设计了一种蛇形软体机器人。该研究2018年发表于国际顶级机器人期刊《sciencerobotics (科学-机器人学)》上,SDU软体机器人中心的Ahmad Rafsanjani副教授为第一作者。这款蛇形机器人无需依赖任何刚性元件,它的鳞片采用剪纸艺术制成。

图2. 蛇靠腹足有规律的波动前进
图3. 剪纸启发的蛇形软体机器人
剪纸艺术不同于折纸艺术,剪纸形变依靠的是剪切,而不是折叠。当机器人伸展时,扁平的二维剪纸表面会转化为三维织纹表面,像蛇鳞一样抓住地面。
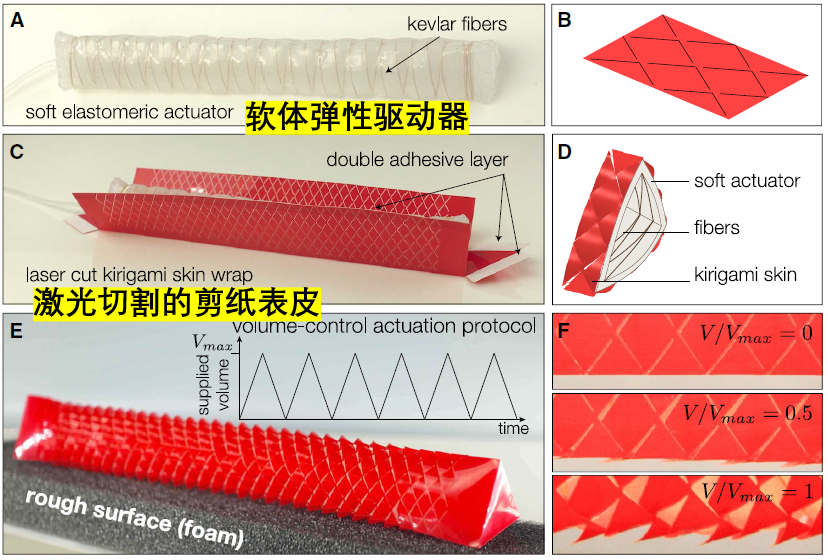
图4. 剪纸机器人的设计和加工
研究人员从一张平面塑料纸开始,使用雷射切割机切割一组厘米级的切痕。他们将切好的塑料纸包覆住如同管子一样的弹性体致动器,而这种致动器充气后会膨胀伸长。当致动器充气时,剪纸切口突出,形成一个粗糙表面,抓住地面。当致动器泄气时,切痕折叠成平面,推进机器人前进。
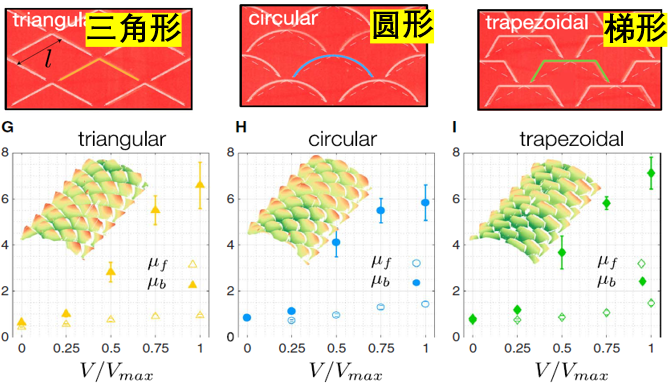
图5. 三种不同形状的仿生剪纸结构设计
团队实验了各种形状的切痕,包括:三角形、圆形、梯形。他们发现梯形切痕,最接近蛇鳞的形状,使得机器人的移动幅度达到最大。
图6. 三种不同剪纸结构的机器人运动对比
相关论文信息
Rafsanjani, A., Zhang, Y., Liu, B., Rubinstein,S. M., & Bertoldi, K. (2018). Kirigami skins make a simple soft actuatorcrawl. Science Robotics, 3(15).
https://robotics.sciencemag.org/content/3/15/eaar7555
▍剪纸超材料软体机器人
剪纸艺术为软体机器人带来了更多的可能性。如果将一种可拉伸的剪纸结构包覆在弹性气囊表面,当该气囊充气膨胀时,受到剪纸结构的约束,气囊就会按照设计的形状发生形变。这项技术在机器人,医疗等领域都有着广泛的应用前景。该研究于2020年在国际顶级材料学期刊《先进材料(Advanced Materials)》,Ahmad Rafsanjani为论文作者之一。
图7. 剪纸结构启发的软体驱动器
具体而言,一个剪纸启发的软驱动器中包含按规律切割的剪纸薄片和气囊。气囊膨胀时,剪纸切口引导其生长,使一些区域膨胀,另一些区域收缩。由此,我们就能在全局范围内控制宏观形状,以及在局部范围内构建微观特征(这也就是超材料的特征)。
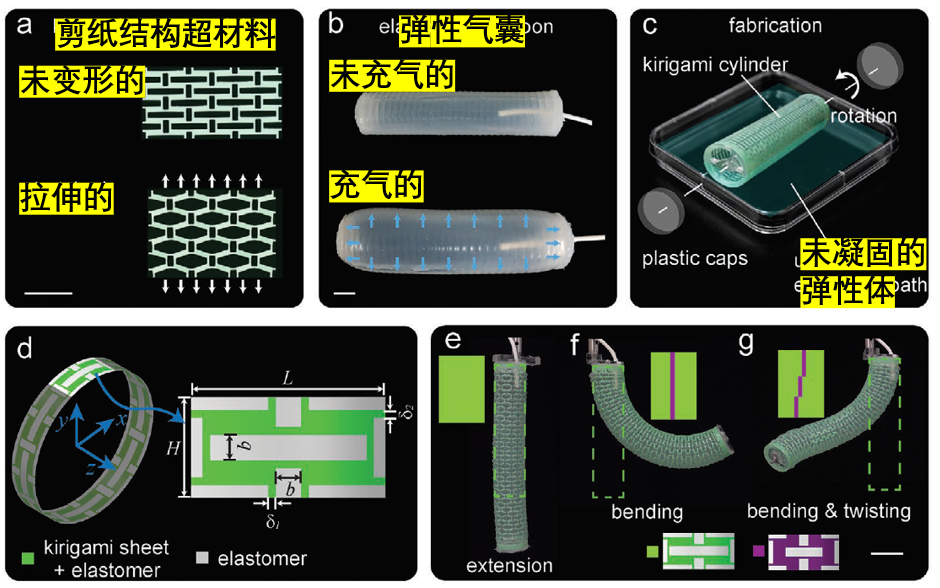
图8. 剪纸结构驱动器的设计加工
研究人员发现,通过调整切口的几何参数就能够控制和嵌入复杂形状。研究者开发了一种逆向设计算法,能使剪纸充气装置在最佳模式下充气模拟目标形状。这项成果为多尺度结构的设计奠定了基础。
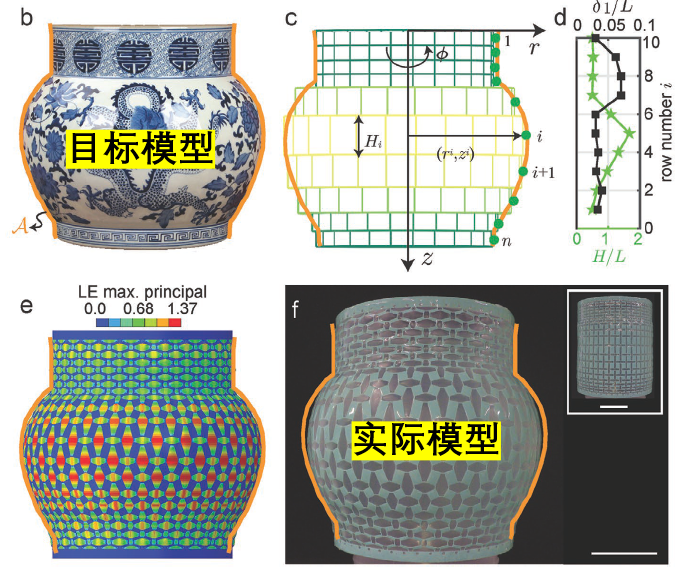
图9. 通过优化算法设计的瓷器结构
研究人员用可编程气球制作出了挂钩和陶瓷花瓶。基本上只要改变两个参数,就能用剪纸气球编程出各种奇特的形状。
图10.瓷器结构变形展示
图11.挂钩结构变形展示
相关论文信息:
Jin, L., Forte, A. E., Deng, B., Rafsanjani,A., & Bertoldi, K. (2020). Kirigami‐Inspired Inflatables with Programmable Shapes. AdvancedMaterials, 32(33), 2001863.
https://doi.org/10.1002/adma.202001863
▍SDU软体机器人中心的其他软体机器人简介
宣传视频中还有一些其他的软体机器人展示,在这里简单罗列出来,感兴趣的朋友可以去查看相关论文,另外文末也附有完整的宣传视频。
Jonas Jørgensen助理教授研发的一款仿生机器人启发自线翎电鳗。线翎电鳗是一种热带淡水鱼,因为没有背鳍,它借着摆动身体下侧的旗状鱼鳍移动,能够使它自在的向前、向后及垂直移动,泳姿优美且独特。
图12. 线翎电鳗
图13.线翎电鳗启发的软体机器人
机器人的鱼鳍和身体由硅胶和六个伺服电机驱动的骨架组成。通过控制鱼鳍周期性的摆动,可以控制这款鱼形机器人的游泳方向和速度。
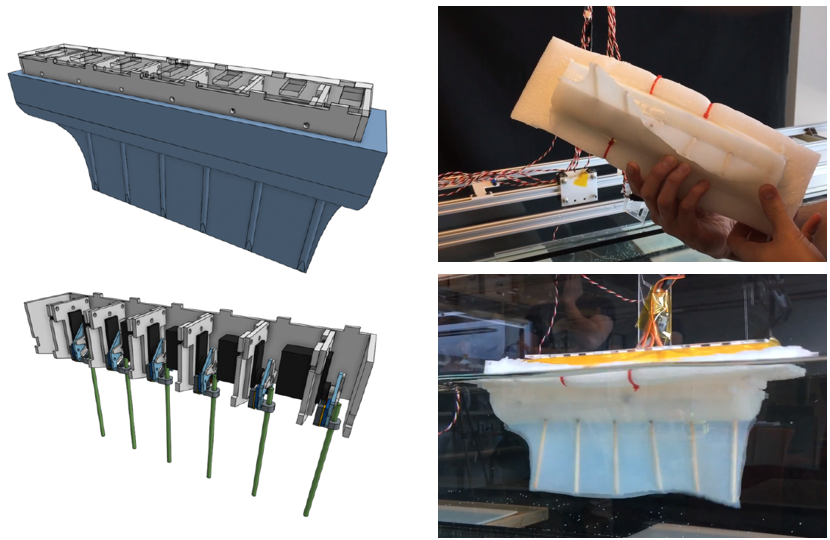
图14.线翎电鳗机器人的结构设计
文章信息:Veenstra, F.,Jørgensen, J., & Risi, S. (2018, July). Evolution of fin undulation on aphysical knifefish-inspired soft robot. In Proceedings of the Geneticand Evolutionary Computation Conference (pp. 157-164). https://dl.acm.org/doi/10.1145/3205455.3205583
Ahmad Rafsanjani副教授参与研发的软体超材料结构,遇到外界刺激可以迅速做出特定模式的响应。发表于国际著名期刊《PNAS》上。
图15.软体超材料变形示意图
文章信息:Jin, L.,Khajehtourian, R., Mueller, J., Rafsanjani, A., Tournat, V., Bertoldi, K.,& Kochmann, D. M. (2020). Guided transition waves in multistable mechanicalmetamaterials. Proceedings of the National Academy of Sciences, 117(5),2319-2325.
https://www.pnas.org/content/117/5/2319.short
Jonas Jørgensen研发的一款用于验证软体机器人在人机交互中潜在应用价值的触手,这款软体触手在接近或者触碰到人体或其他障碍物的时候会做出响应,以此来实现和环境的交互。
图16.软体机器人——人机交互
文章信息:Jørgensen, J.(2018, March). Perceptions of a Soft Robotic Tentacle in Interaction. In Companionof the 2018 ACM/IEEE International Conference on Human-Robot Interaction (pp.377-377). https://dl.acm.org/doi/abs/10.1145/3173386.3177532
Jonas Jørgensen也将软体机器人应用到其他和人交互的场景,例如艺术展示中。他设计了一款软体机器人,启发自神话故事中的角色,搭配声音进行展示。
图17.软体机器人——艺术
论文信息:Jørgensen, J.(2017, June). Leveraging morphological computation for expressive movementgeneration in a soft robotic artwork. In Proceedings of the 4thInternational Conference on Movement Computing (pp. 1-4).
https://dl.acm.org/doi/abs/10.1145/3077981.3078029
▍结语
大多数机器人由高精确度和高重复性的硬机构组成。在生物体中却融合了各种刚度的材料,以使他们能够适应各种不同的环境。SDU软体机器人的研究,旨在为当代机器人技术提出许多有趣的新问题和挑战,尤其是在设计,控制,传感和交互领域。他们致力于在软化机器人,仿生建模,人机交互和机器人艺术方面的各种专业知识的基础上,为软机器人提供一种系统的研究方法。
具体来说,他们希望阐明软机器人的适当设计标准是什么;如何针对给定任务(包括与人的协作)设计和部署适应性强的软体;如何将电子和计算技术集成到软机器人解决方案中;以及如何在具有特定自然约束的不同环境中利用局部和远端传感进行探索。
责任编辑:lq